Summary
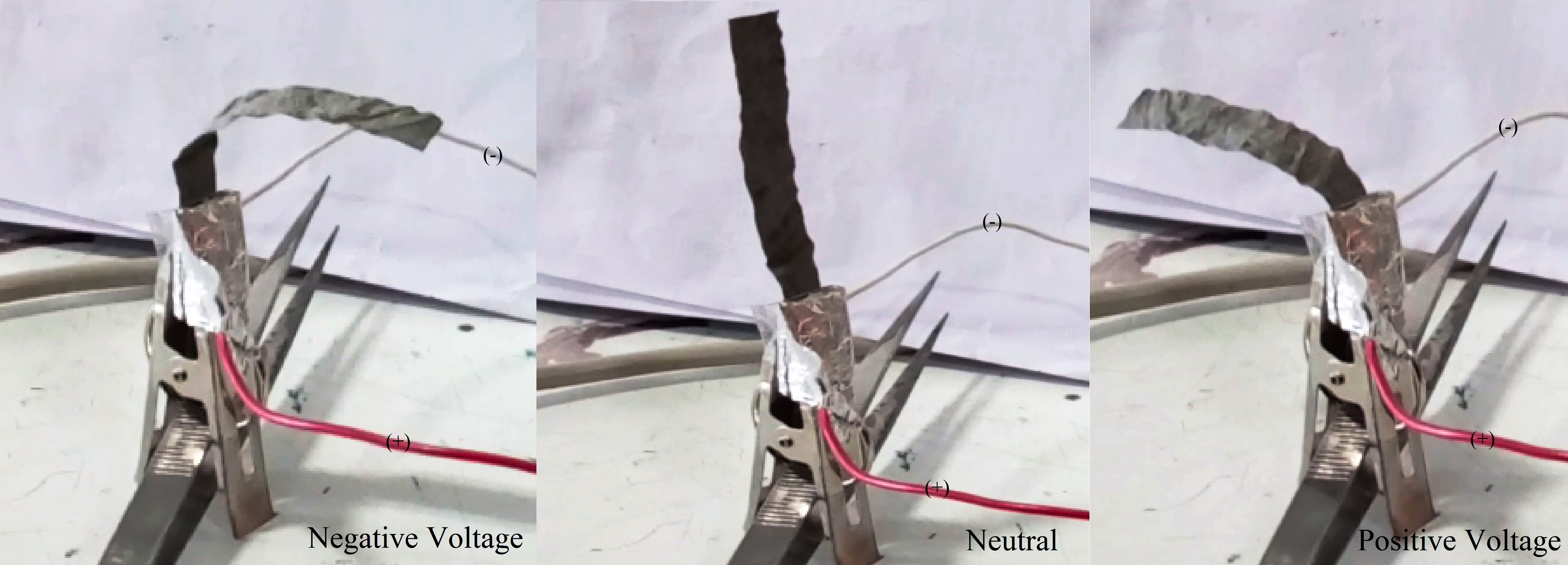
We presented actuation capabilities of miniature robotic fingers based on Ionic Polymer Metal Composite (IPMC).The IPMC is attractive for applications of soft actuation such as in case of artificial muscles as the IPMC’s are usually light weight, flexible and response towards lower bipolar actuation voltages. In this work we have used the recently developed ionomer named Kraton is used for fabrication of IPMC based finger mussels. Silver (Ag) electrodes are fabricated with the help of electro- less plating method using silver nitrate. The polymer also provides sensing capabilities and are used for detection of surface. The strips of polymer are used as finger muscles with bone structures on it for imitating the natural hand structure